ABOUT
ESMERISE
THESIS
CONTACTS
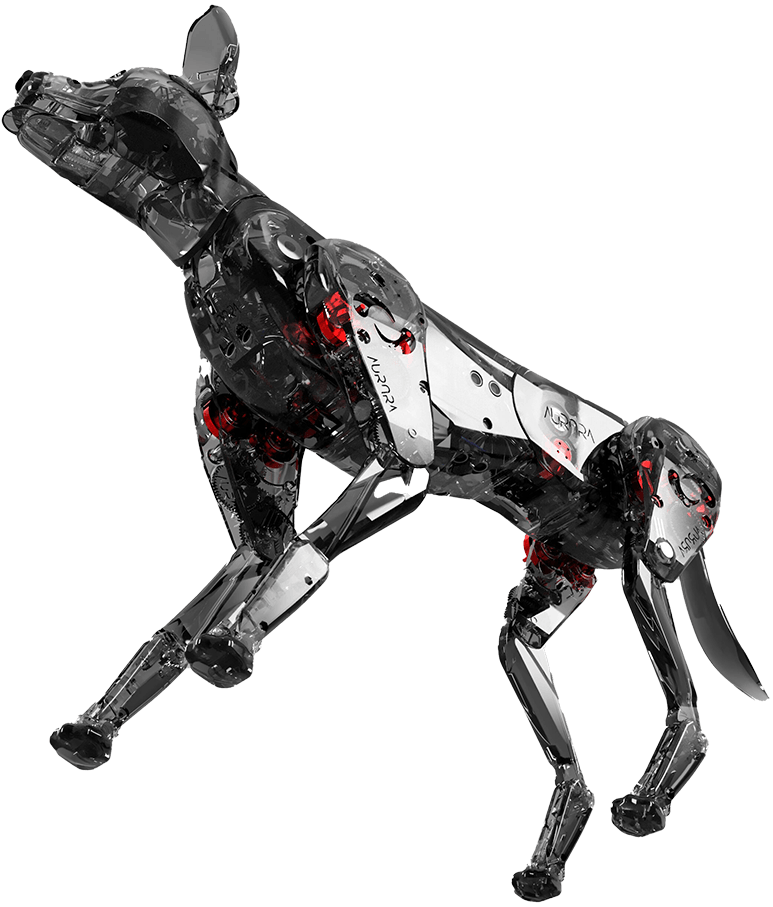
Aurora
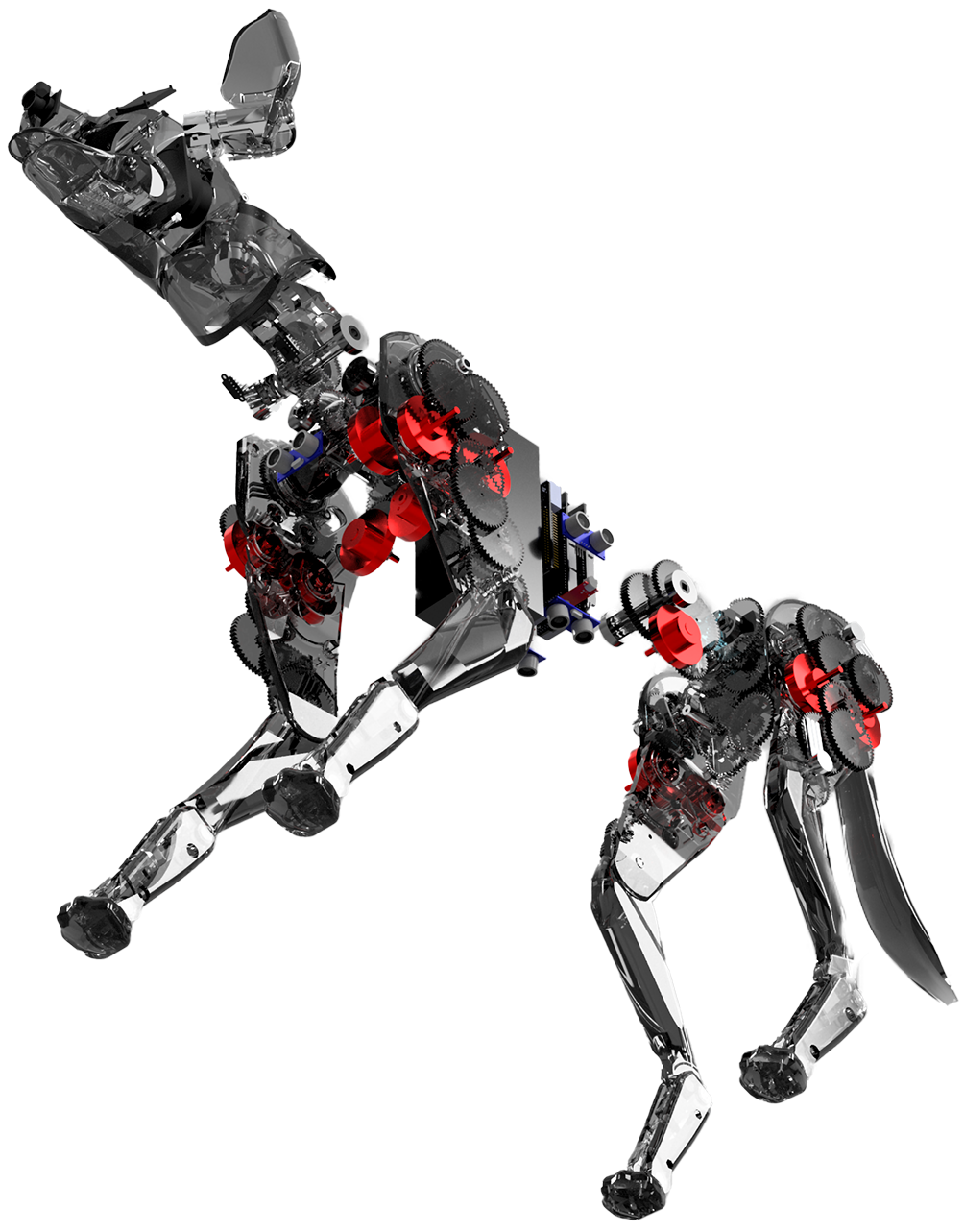
As my thesis project I engineered, 3D modeled and built a robotic dog from scratch.
Specs:
28DOF (20 motorized)
44 different sensors (to see, hear, locate its body position in space)
14 1kW brushless motors with custom gearboxes (main movements)
6 modified 28byj-48 stepper motors (accessory movements)
10Ah 24V Li-Po battery with custom magnetic charging connector
Raspberry pi 4 with ROS & multiple Arduinos as controllers